




스스로 새우를 요리하고 청소하는 로봇
정교한 로봇을 제작하는 데 반드시 큰 비용을 들일 필요는 없는 것으로 보인다. 새 연구 결과에 따르면 비교적 저렴한 로봇도 인공지능(AI)을 활용할 경우 복잡한 조작이 필요한 작업을 수행할 수 있으며 새로운 기술도 빠르게 배울 수 있는 것으로 나타났다.
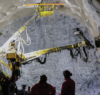
스탠퍼드 대학교(Stanford University) 연구팀은 3만 2,000달러(약 4,300만 원)만 사용해서 인간의 감독하에 3코스 광둥요리를 만들 수 있는 바퀴 달린 로봇을 만들었다. 그런 다음, 연구팀은 AI를 활용해서 해당 로봇이 새우 요리, 얼룩 청소, 엘리베이터 호출 같은 개별 작업을 자율적으로 수행하도록 학습시켰다. 이렇게 복잡한 작업을 수행할 수 있는 로봇을 제작하려면 일반적으로 수십만 달러의 비용이 소요되지만, 연구팀은 기성 로봇 부품과 3D 프린터로 출력한 하드웨어를 사용하여 프로젝트 비용을 크게 절감할 수 있었다.
연구팀은 ‘모바일 알로하(Mobile ALOHA, 저비용 오픈소스 하드웨어 원격제어 양손 조작 시스템(a low-cost open-source hardware teleoperation system for bimanual operation)의 약자)’라고 이름 붙인 이 로봇에 프라이팬 헹구기, 사람과 하이파이브하기 등 다양한 수준의 기동성과 민첩성이 필요한 7가지 작업을 가르쳤다.
예를 들어 로봇에 새우 요리법을 가르치기 위해 연구팀은 로봇을 원격으로 20회 작동시켜 새우를 프라이팬에 넣고 뒤집은 다음 그릇에 옮겨 담는 과정을 반복시켰다. 프로젝트 공동 책임자인 스탠퍼드 대학교의 박사과정 학생 찌펑 푸(Zipeng Fu)는 로봇이 동일한 작업을 수행하는 다양한 방법을 학습할 수 있도록 매번 로봇 조작 방식에 조금씩 변화를 줬다고 설명했다.
프로젝트의 지도교수였던 스탠퍼드 대학교의 조교수 첼시 핀(Chelsea Finn)은 “새우 요리법을 학습시킨 이후에는 키친타월을 뜯거나 테이프를 떼어내는 등 바퀴가 없는 초기 알로하 로봇이 학습했던, 새우 요리와 관련이 없는 다른 유형의 작업 시연을 바탕으로 로봇을 학습시켰다”고 밝혔다. 이렇게 새로운 데이터와 오래된 데이터를 결합하는 ‘협동학습(co-training)’ 접근 방식은 수백만 개는 아니더라도 수천 개의 예제를 통해 AI 시스템을 학습시키는 일반적인 접근 방식에 비해 모바일 알로하가 새로운 작업을 비교적 빠르게 학습하는 데 도움이 되었다. 핀은 기존 로봇이 학습했던 오래된 데이터를 활용함으로써 이번 로봇이 주어진 작업과 무관한 새로운 기술을 학습할 수 있었다고 설명했다.
모바일 알로하에게 학습시킨 종류의 집안일은 인간에게는 적어도 마음만 먹으면 할 수 있는 쉬운 일이지만, 로봇에게는 여전히 매우 어려운 일이다. 로봇은 인간에게는 자연스러운 능력인 정밀성과 조작 능력, 주변 환경에 대한 이해가 부족하기 때문에 물건을 붙잡거나 움켜쥐거나 조작하는 데 어려움을 겪는다. 그러나 로봇공학에 AI 기술을 적용하려는 최근의 노력을 통해 로봇의 새로운 기능에 대한 수많은 가능성이 드러났다. 예를 들어 구글의 RT-2 시스템은 로봇에 언어-시각 모델을 결합하여 인간이 로봇에 구두로 명령을 내릴 수 있도록 했다.
핀은 “매우 흥미로운 부분 중 하나는 이러한 모방학습(imitation learning) 방식을 어디에든 적용할 수 있다는 점이다. 이 방식은 매우 간단하고 확장성도 뛰어나다”고 강조했다. 핀은 로봇이 모방할 데이터를 더 많이 수집하면 주방에서 더 많은 일을 할 수 있도록 학습시킬 수 있을 것이라고 덧붙였다.
이번 연구 참여자는 아니지만 뉴욕대학교(New York University)의 컴퓨터과학과 부교수인 레렐 핀토(Lerrel Pinto)는 “모바일 알로하는 비교적 저렴한 로봇 하드웨어로 매우 복잡한 문제를 해결할 수 있다는 특별한 가능성을 직접 보여주었다”고 말했다.
역시 이번 연구에 참여하지 않은 카네기멜런 대학교(Carnegie Mellon University)의 조교수 디팍 파탁(Deepak Pathak)은 “모바일 알로하는 로봇 하드웨어가 이미 뛰어난 능력을 갖추고 있으며 AI를 덧붙이면 더 유용한 로봇을 만들 수 있다는 것을 보여준다”고 덧붙였다.
핀토는 이 모델이 로봇의 학습 데이터가 다른 작업에서도 활용될 수 있다는 사실을 보여준다고 설명했다. 즉 한 가지 작업에 대해 학습시키면 다른 작업에 대한 성능도 향상시킬 수 있다는 것이다. 핀토는 “관심 있는 작업에 대한 데이터가 아니라고 해도 전체적인 데이터가 늘어나면 로봇의 성능 향상에 도움이 될 수 있다는 것이므로 이는 매우 바람직한 특성이라고 할 수 있다”고 강조했다.
스탠퍼드 연구팀의 다음 단계에 대해서 연구팀의 박사과정 학생 토니 자오(Tony Z. Zhao)는 더 많은 데이터로 로봇을 학습시켜 구겨진 빨래를 집어서 접는 것 같은 더 어려운 작업을 수행할 수 있도록 할 계획이라고 밝혔다. 빨래는 로봇이 이해하기 어려운 모양으로 뭉쳐져 있기 때문에 로봇에게는 늘 매우 어려운 대상이었다. 그러나 자오는 스탠퍼드 연구팀의 기술을 활용하면 이전에는 기계가 할 수 없을 것이라고 생각했던 작업들을 기계가 처리할 수 있게 하는 데 도움이 될 것이라고 밝혔다.