



DANIJAR.COM
This robot dog just taught itself to walk
막 걷는 법을 배운 로봇 개
컴퓨터 시뮬레이션 없이 실제 세상에서 새로운 기술을 습득할 수 있는 AI 로봇이 탄생했다. 시행착오와 강화학습 같은 방법을 사용하는 AI를 이용해서 로봇은 새로운 기술을 배우고 실제 세상의 복잡한 환경에 빠르게 적응할 수 있다.
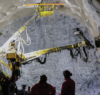
로봇 개 한 마리가 마치 화가 난 딱정벌레처럼 허공에서 다리를 흔들고 있다. 10분 동안 애를 쓴 후에 로봇 개는 간신히 앞쪽으로 굴러가는 데 성공한다. 그리고 30분 후 로봇은 마치 갓 태어난 송아지처럼 서투르게 첫 발걸음을 내딛는다. 한 시간이 지나자 로봇은 자신 있는 발걸음으로 연구소 여기저기를 돌아다닌다.
다리가 네 개 달린 이 로봇 개에는 특별한 점이 있다. 이 로봇 개가 컴퓨터 시뮬레이션을 통해 무엇을 해야 하는지 보여주지 않았는데도 이 모든 과정을 스스로 학습했다는 점이다.
캘리포니아대학교 버클리 캠퍼스의 다니자르 하프너(Danijar Hafner)는 원하는 행동에 대해 보상하는 방식으로 알고리즘을 학습시키는 ‘강화학습(reinforcement learning)’이라는 인공지능(AI) 기술을 사용해서 이 로봇 개가 현실 세계에서 걷는 법을 처음부터 배울 수 있도록 학습시켰다. 연구팀은 같은 알고리즘을 사용해서 다른 세 개의 로봇도 성공적으로 학습시켰다. 그중에서 한 로봇은 한쪽 쟁반에서 공을 집어서 다른 쟁반으로 옮기는 법을 배웠다.
기존에는 로봇이 현실 세계에서 무언가를 시도하려면 그 전에 컴퓨터 시뮬레이터를 이용해 학습해야 했다. 예를 들어 캐시(Cassie)라고 불리는 한 쌍의 로봇 다리는 강화학습을 이용해서 스스로 걷는 법을 배웠지만, 이를 위해서 시뮬레이션 학습을 먼저 거쳐야 했다.