




사진: 보스턴다이내믹스
Super Porter, Four-Footed Robot is coming
어디든 따라오는 ‘슈퍼 짐꾼’, ‘네발 로봇’이 온다
스팟은 마치 강아지처럼 걸어 다니는 ‘네발 로봇(4족 보행 로봇)’이다. 크기도 중형견과 비슷해 ‘로봇 개’라고 불린다.
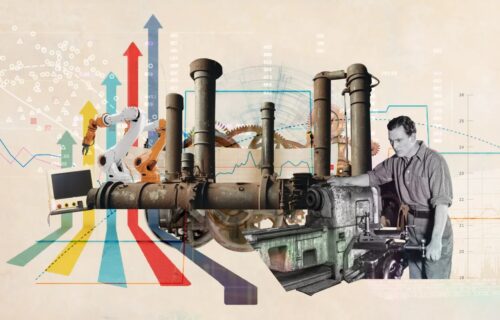
포스코 광양제철소 1고로. 뜨거운 열기가 쏟아져 나와 인간이 작업하기엔 위험이 따르는 곳이다. 그동안은 안전장비를 갖춘 사람이 맡아왔던 이 작업에 로봇이 투입되기 시작했다. 현대자동차가 투자한 로봇 전문기업 ‘보스턴다이내믹스’이 만든 ‘스팟(SPOT)’이 사람 대신 제철소 고로를 점검하기 시작한 것이다. 스팟은 마치 강아지처럼 걸어 다니는 ‘네발 로봇(4족 보행 로봇)’이다. 크기도 중형견과 비슷해 ‘로봇 개’라고 불린다.
스팟이 광양제철소에서 맡은 일은 송풍구의 적열 상태, 가스유출, 냉각수 누수 여부 등을 점검하는 것. 44개 송풍구 점검에 40분이면 충분해 사람 못지않은 작업 속도를 자랑한다. 점검을 마친 스팟은 충전장치 쪽으로 자동으로 걸어간 다음, 배터리를 충전하면서 동시에 수집한 데이터를 전송한다. 포스코 측은 5월 18일 열린 ‘산업 안전을 위한 디지털 혁신’ -중대재해처벌법, AI로 돌파한다’ 행사에서 스팟의 활용을 안전 관리 사례로 소개하면서 “현재 스폿 활용에 관한 기술검증(PoC)이 마무리 단계에 있다”면서 “효용이 입증되면 도입을 확대할 계획”이라고 했다.