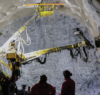





COURTESY OF MIT CSAIL
Generative AI taught a robot dog to scramble around a new environment
낯선 환경도 문제없다…생성형 AI로 진화하는 로봇 학습
100% 생성형 AI로 만든 가상 세계로 학습한 로봇이 전통적인 시뮬레이션 방식으로 학습한 로봇에 비해 훨씬 더 뛰어난 성능을 보였다.
로봇이 낯선 환경에 적응하도록 가르치기 쉽지 않다. 사람이 촬영한 영상물에서 추출한 데이터를 이용해 로봇에게 물리적 현실 세계를 훈련시킬 수 있지만 이러한 데이터는 한정되어 있고 수집하는 데 비용도 많이 든다. 실제 시스템이나 환경을 가상으로 재현하는 디지털 시뮬레이션은 로봇에게 새로운 것을 가르치는 빠르고 확장성이 뛰어난 방법이지만 이 경우에도 작업 무대를 가상 세계에서 현실 세계로 옮겨 동일한 작업을 지시하면 로봇은 종종 실수를 저지르곤 한다.
하지만 이제 더 나은 대안이 등장했다. 생성형 인공지능(AI) 모델과 물리적 시뮬레이터를 결합해 현실 세계와 더 유사한 가상 훈련 환경을 구축하는 루시드심(LucidSim)이라는 새로운 시스템이다. 이 시스템으로 훈련한 로봇은 전통적인 방법으로 훈련된 로봇보다 현실 세계 테스트에서 더 높은 성공률을 거뒀다.
연구팀은 이 시스템을 이용해 로봇 개에게 파쿠르(parkour), 즉 도시와 자연환경 속에 존재하는 다양한 장애물들을 활용하여 효율적으로 이동하는 훈련을 시켰다. 이 과정에서 로봇은 현실 세계에 대한 데이터 없이도 상자를 뛰어넘고 계단을 오르는 것과 같은 일상적인 작업을 익혔다. 이 방식은 로봇에게 어려운 작업을 가르칠 때 생성형 AI가 얼마나 유용하게 활용될 수 있는지를 보여준다. 더 나아가 이는 전적으로 가상 세계를 통해서만 로봇을 훈련시킬 수 있는 가능성도 제시한다. 이 연구는 최근 로봇 학습 콘퍼런스(CoRL)에서 발표됐다.