




UNIST, 손길 알아채고 감정 자연스럽게 표현하는 소셜 로봇 기술 개발
돌봄 로봇이나 반려 로봇이 사람과 자연스럽게 교감하려면, 사람의 손길을 알아채는 능력과 상황에 맞게 감정을 드러내는 능력이 함께 필요하다. 그 두 가지를 동시에 끌어올린 연구가 나왔다.
돌봄 로봇이나 반려 로봇 같은 소셜 로봇이 사람이나 반려견처럼 생생하고 자연스럽게 교감하도록 돕는 기술이 국제 무대에서 공개됐다. UNIST(울산과학기술원)는 디자인학과 이희승 교수팀이 로봇이 사람의 손길을 알아채는 ‘인지’ 기술과 감정을 자연스럽게 드러내는 ‘표현’ 기술을 각각 개발했다고 21일 밝혔다.
이번 연구는 두 편의 논문으로 나뉘어 로봇 분야 국제학술대회인 국제로봇자동화학술대회(ICRA)에서 각각 발표됐다. 손길을 알아채는 능력과 상황에 맞게 감정을 표현하는 능력은 소셜 로봇(social robot, 사람과 정서적으로 상호작용하도록 만든 돌봄·반려·교육용 로봇)이 사람과 자연스럽게 교감하기 위한 두 축으로, 연구팀은 이 둘을 함께 다뤘다.
소셜 로봇에 왜 ‘교감’이 필요한가
소셜 로봇은 사람과 가까이 지내며 정서적으로 상호작용하는 로봇이다. 돌봄 로봇, 교육용 로봇, 반려 로봇이 대표적이다. 이런 로봇이 사람과 자연스럽게 교감하려면, 말뿐 아니라 사람이 건네는 손길을 이해하고 자신의 감정을 적절히 드러낼 수 있어야 한다.
문제는 두 능력 모두 쉽지 않다는 데 있다. 사람은 로봇을 톡톡 두드리거나 쓰다듬는 손길로 감정과 의도를 전한다. 그러나 사람마다 손 크기와 누르는 힘이 달라 같은 행동도 서로 다른 신호로 나타나기 때문에, 로봇이 손길에 담긴 의도를 일관되게 읽어내기 어려웠다.
감정 표현도 마찬가지다. 기존 로봇들은 감정을 표현할 때 늘 비슷한 강도로 움직여 기계적인 느낌이 강했다. 사람은 같은 감정도 상황에 따라 강하게도, 약하게도 드러내지만, 로봇은 그런 미묘한 강약 조절을 하지 못했다. 연구팀은 이 두 가지 한계를 각각의 기술로 풀었다.
목소리 읽듯 ‘손길’을 읽다…정전식 터치 인식
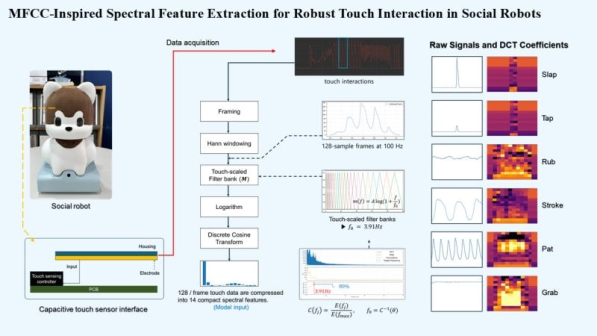
첫 번째 성과는 터치 인식 기술이다. 연구팀은 음성 인식 기술에서 아이디어를 얻었다. 음성 인식이 사람마다 목소리가 달라도 단어에 담긴 공통 주파수 특징을 읽어내는 것처럼, 손길에 반복적으로 나타나는 리듬이나 진동을 정전식 터치센서(capacitive touch sensor, 스마트폰 화면처럼 손이 닿을 때 생기는 전기적 변화를 감지하는 센서) 신호에서 추려내는 방식이다.
이렇게 하면 사람마다 다른 손의 크기나 힘의 세기 같은 개인차에 덜 흔들리면서, 손길 자체의 특징을 잡아낼 수 있다. 복잡한 촉각 장치를 촘촘히 붙이지 않고도 단순한 정전식 터치센서만으로 손길의 차이를 구분할 수 있다는 점이 특징이다.
제1저자인 김지수 연구원은 “똑같이 친근감을 표현하기 위해 반려견 로봇을 톡톡 두드리더라도 사람마다 손 크기와 힘의 세기가 다르다 보니 손길에 담긴 의도를 제대로 인식하기 어려웠다”며 “이번 기술은 복잡한 촉각 장치 없이도 정전식 터치센서만으로 손길의 차이를 잘 구분할 수 있게 했다”고 설명했다.
놀람은 강하게, 과한 감정은 적당히…감정 표현의 ‘강도 조절’
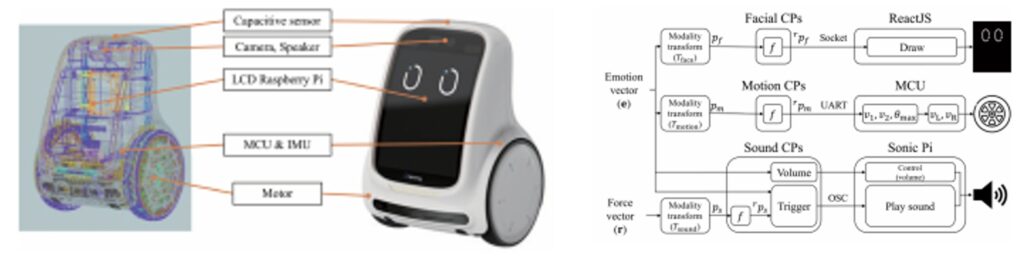
두 번째 성과는 감정 표현을 더 살아 있는 생명체처럼 만드는 기술이다. 연구팀은 로봇의 감정 동역학 모델에 감쇠비(Damping Ratio, 흔들리던 움직임이 가라앉는 정도를 나타내는 값으로, 낮을수록 반응이 크고 역동적으로 나타남)를 조절하는 방법을 적용했다. 이를 통해 움직임이 목표 위치를 지나쳤다가 되돌아오는 과장 정도, 즉 오버슈트(overshoot)를 5단계로 세밀하게 부여했다.
핵심은 감정마다 적절한 강도가 다르다는 점을 반영한 것이다. 큰 반응이 필요한 ‘놀람’은 더 강하게 표현하고, 지나치게 과장되면 오히려 어색해질 수 있는 감정은 중간 강도로 표현하도록 조절할 수 있게 했다. 감정을 무조건 크게 드러내는 대신, 상황과 감정의 성격에 맞춰 강약을 다듬은 것이다. 이 연구는 박하은 박사가 제1저자로 참여했다.
이희승 교수는 “소셜 로봇이 사람과 자연스럽게 교감하려면 사람의 손길을 알아차리는 능력과 상황에 맞게 감정을 표현하는 능력이 함께 필요하다”며 “이번 연구는 돌봄 로봇, 교육용 로봇, 반려 로봇처럼 사람과 가까이 지내는 로봇을 더 생생하고 친근한 상호작용 대상으로 만드는 데 기여할 것”이라고 말했다. 이번 두 논문이 발표된 ICRA는 국제전기전자공학자협회(IEEE) 산하 로봇자동화학회(RAS)가 주관하는 로봇 분야의 권위 있는 국제학술대회 중 하나로, 올해 학회는 지난 6월 1일부터 5일까지 오스트리아 빈에서 열렸다.