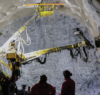





2015년 열린 재난로봇경진대회Darpa Robotics Challenge에서 활약중인 한국형 휴머노이드로봇 휴보의 모습_사진: KAIST
Rediscovery of Humanoid Robots - Future Superheroes to Save Human Life
인간 목숨 구하는 미래의 슈퍼히어로- 휴머노이드 로봇의 재발견
‘휴머노이드(인간형) 로봇’ 기술이 새롭게 주목받고 있다. 그간 ‘쓸모없다’는 평가를 받던 휴머노이드 로봇의 가치가 최근 새롭게 인정받으면서 다양한 기업 및 연구기관에서 다시금 연구개발에 집중하는 분위기다.
휴머노이드(인간형) 로봇 기술이 새롭게 주목받고 있다. 그간 ‘쓸모없다’는 평가를 받던 휴머노이드 로봇의 가치가 최근 새롭게 인정받으면서 다양한 기업 및 연구기관에서 다시금 연구개발에 집중하는 분위기다.
대표적 사례는 ‘혁신의 대명사’로 불리는 기업가 ‘일론 머스크’의 자동차 회사 ‘테슬라’다. 이 회사는 차세대 휴머노이드 로봇 ‘옵티머스’를 개발 중이라고 발표했는데, 앞으로 2개월 이내에 선보일 예정이다. 머스크는 지난 21일 카타르 경제 포럼에서 “9월 30일 테슬라 ‘AI 데이’에 로봇 시제품을 전시하겠다”고 밝혔다.
테슬라에 따르면 옵티머스는 키 약 172cm에 시속 8km 속도로 이동할 수 있다. 힘도 매우 강해서 최대 68㎏의 물건을 들 수 있다. 공장 및 기타 작업 환경에서 위험하고 지루한 작업을 처리할 수 있다. 자동차 생산공장에서 볼트를 조립하는 작업 등 다양한 일을 할 수 있다. 예상대로 진행된다면 공장 등에서 일하는 최초의 휴머노이드 로봇이 될 수 있을 것으로 보인다.
왜 쓸모없다는 평가를 받았을까?
휴머노이드 로봇이 한층 세상의 주목을 받던 것은 일본 혼다의 ‘아시모’와 우리나라 KAIST의 ‘휴보’가 인기를 끌던 2000년대의 일이다. 2010년 이후 여러 종류의 휴머노이드 로봇이 우후죽순처럼 생겨나면서 휴머노이드 로봇에 관한 관심은 크게 하락하는 듯했다. 더는 신기해 보이지 않았기 때문이다.